确定阈值
首先需要根据具体的检测对象和检测目标来确定一个合适的阈值。这个阈值可以基于经验值、统计分析或者对大量无缺陷和有缺陷样本数据的分析得到。例如,在图像的灰度值检测中,如果已知正常表面的灰度值范围,就可以根据这个范围设定一个区分正常和缺陷的阈值。如果灰度值超出了这个设定的阈值范围,就可能被判定为缺陷。这一过程需要对检测对象的特性有深入的了解,并且可能需要多次试验来确定最佳的阈值。
数据采集与处理
采集检测对象的数据,数据的类型取决于检测的方法。如果是光学检测,可能是图像数据;如果是基于传感器的检测,可能是电信号等数据。对于采集到的数据,要进行预处理,如去噪、增强等操作。以图像数据为例,可能会采用滤波算法去除图像中的噪声,增强图像的对比度,以便更准确地进行阈值判断。
阈值比较
将经过处理的数据与设定的阈值进行比较。在表面缺陷检测中,如果是检测物体表面的平整度,可能会设定一个平整度的阈值。使用传感器测量物体表面的高度数据,然后将每个测量点的高度数据与阈值进行比较。如果高度差超过了阈值,就判定该点为缺陷点。
结果输出与判定
根据阈值比较的结果输出检测结果。可以将检测结果以可视化的方式显示出来,如在图像上标记出缺陷区域;或者以数据报告的形式输出,统计缺陷的数量、位置等信息。例如,在自动化生产线上,如果检测到产品表面存在缺陷,就可以输出信号控制分拣装置将有缺陷的产品剔除。
二、表面缺陷检测的方法
(一)传统检测方法
目视检查法

这是最基本的检测方法,检测人员直接用肉眼观察被检测物体的表面,判断是否存在缺陷。这种方法简单、易行,但受检测人员的主观因素影响较大,而且对于微小的、不易察觉的缺陷可能会漏检。检测效率相对较低,适用于对检测精度要求不高、样本量较小的情况。
照明检测法
通过特殊的照明方式来突出物体表面的缺陷。例如,使用侧光照明可以使物体表面的划痕等缺陷产生阴影,从而更容易被观察到;背向散射照明可以检测到物体内部的一些缺陷在表面的投影。这种方法可以在一定程度上提高检测的准确性,但对于一些复杂形状的物体或者特殊材质的物体,可能需要调整照明的角度和强度等参数。
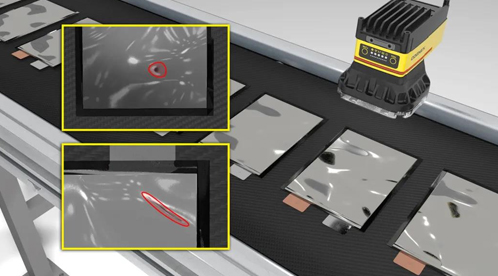
摄像检测法
利用摄像头拍摄被检测物体的表面图像,然后对图像进行分析处理。可以检测到如裂纹、孔洞、污渍等多种缺陷。随着技术的发展,摄像检测法的分辨率不断提高,并且可以结合图像处理算法,实现自动化的缺陷检测。例如,在工业生产线上,可以实时拍摄产品表面图像,然后通过计算机算法判断产品是否合格。
红外热像检测法
基于物体表面的温度分布来检测缺陷。当物体表面存在缺陷时,可能会导致热量传导不均匀,从而在红外热像图上表现出温度异常区域。这种方法对于检测内部缺陷在表面的反映比较有效,例如检测建筑墙体内部的空洞或者管道内部的堵塞在表面的热传导异常情况。它的检测精度可能受到环境温度、物体表面发射率等因素的影响。
激光检测法
利用激光与物体表面相互作用的特性来检测缺陷。例如,激光散射检测可以根据激光在物体表面散射光的强度、方向等特性的变化来判断表面是否存在缺陷;激光干涉测量可以检测到物体表面微小的平整度变化。激光检测法具有高精度、非接触式的优点,但设备成本相对较高,对操作人员的技术要求也较高。
涡流检测(Eddy Current Testing,ET)
基于电磁感应原理,主要适用于导电材料的表面及近表面的检测。当线圈靠近导电材料表面时,被测物表面产生感应电流,因缺陷造成的材质、尺寸变动会引起线圈阻抗变化,利用涡流检测仪监测这种变化量就能判断出被测物表面是否存在缺陷。它是非接触式检测,不会损害被测物的表面,检测无需耦合介质,检测速度快,灵敏度高。但被检测对象必须是导电材料,一般只适用于金属表面缺陷检测,对被测物的表面状态要求较高,在检测粗糙度较大的表面时效果不佳,难以准确区分缺陷的种类,一般应用于孔洞、裂纹等缺陷的检测,在检测脏污、轻微划痕等缺陷时并不适用。
交流电磁场检测(Alternating Current Field Measurement,ACFM)
同样基于电磁感应原理,是综合了交流电位降和涡流检测两种电磁检测方法演化而来的检测方法。主要是利用电磁场在不需接触样本表面的状况下可检测出表面裂纹的长度及深度。它通过激励探头在工件表面产生均匀电流,利用检测线圈拾取平行电流在缺陷处产生扰动而引起磁场畸变信号,再经过信号采集和处理装置将得到反映缺陷长度和深度信息的信号。这种方法无接触检测,不会损害被测物的表面,表面要求低,可穿透涂层,但仅适用于具有高导磁率的铁磁性材料,多用于手持式检测,自动化程度较低,设备昂贵,检测成本高,所能检测的缺陷种类有限。
漏磁检测(Magnetic Flux Leakage,MFL)
是铁磁材料产品常用的表面缺陷检测方法之一,该方法能够直观地显示缺陷的形状、位置和尺寸。在磁化装置的作用下将被测产品磁化至饱和状态,若被测产品无缺陷,则产品中的磁感应线被约束至物体之中,磁通平行于被测物表面,几乎没有磁感应线从表面溢出;若存在破损、腐蚀等缺陷,缺陷部位的材料或形态会导致磁导率变化,将形成与缺陷大小成比例的漏磁场,通过磁敏探头检测泄漏的磁力线,即可推算出被测物上的缺陷形态。它仅适用于铁磁材料产品的检测,且不适用于检测形状复杂的物体。
激光超声检测
利用激光在物体表面产生超声波,通过检测超声波的传播特性来检测表面缺陷。当物体表面存在缺陷时,超声波的传播速度、反射、折射等特性会发生变化,通过分析这些变化来确定缺陷的存在和特征。这种方法可以实现非接触式检测,对被测物体的表面形状适应性较好,但设备复杂,检测技术要求高。
(二)基于机器视觉的检测方法
基于卷积神经网络(CNN)的方法
分类网络
采用基于CNN的分类网络目前已成为表面缺陷分类中最常用的模式。现有表面缺陷分类的网络常常采用计算机视觉中现成的网络结构,包括AlexNet,VGG,GoogLeNet,ResNet,DenseNet,SENet,ShuteNet,MobileNet等。通过将标记了标签(包括类别、矩形框或逐像素等)的缺陷图像输入到网络中进行训练,让网络学习缺陷的特征,从而对新的图像进行缺陷分类,例如可以分类出异色、空洞、经线等缺陷类别。
检测网络
基于深度学习的目标检测方法从结构上可划分为以FasterR – CNN为代表的两阶段(two – stage)网络和以SSD或YOLO为代表的一阶段(one – stage)网络。两阶段网络需要首先生成可能包含缺陷的候选框(proposal),然后进一步进行目标检测;一阶段网络直接利用网络中提取的特征来预测缺陷的位置和类别。例如在PCB缺陷检测中,可以通过这些网络准确地检测出缺陷的位置和类别,并且针对不同的检测对象可以对网络进行改进,如在检测微小的PCB表面缺陷时,可以通过改进网络结构提高检测的准确性。
分割网络
用于将缺陷逐像素从背景中分割出来。通过深度学习算法,让网络学习缺陷与背景的区别特征,从而精确地分割出缺陷区域,这在对缺陷形状、大小要求精确测量的检测任务中非常有用。