工业机器视觉系统实现自动化零件分拣的过程主要包括以下几个关键步骤:
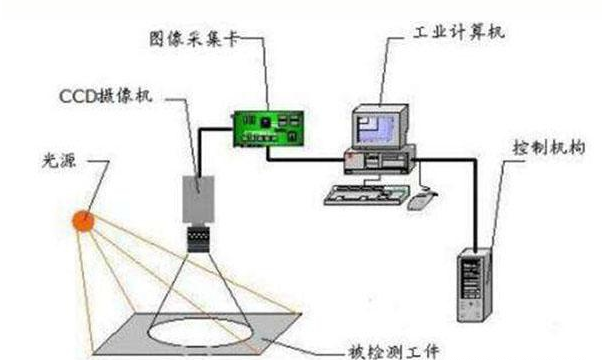
1. 图像采集:
通过相机或传感器对零件进行图像采集,这些图像通常是高清晰度、高分辨率的。
采集到的图像包含零件的光线、颜色、形状等特征,用于后续的处理和识别。
2. 图像处理:
采集到的图像需要经过图像处理算法来提取零件的特征信息。
图像处理算法包括灰度化、二值化、滤波、边缘检测、形态学处理等步骤,这些算法有助于计算机更好地识别零件的特征。
3. 特征提取:
在图像处理后,需要对零件的特征进行提取。
零件的特征可以包括大小、形状、颜色、纹理等,这些特征通过特征提取算法来获取,用于后续的分类和分拣决策。
4. 分类与识别:
根据提取的特征,利用分类算法对零件进行分类和识别。
分类算法能够确定零件所属的类别,从而指导分拣系统如何处理不同的零件。
5. 控制与分拣:
根据分类结果,控制系统控制机械设备对零件进行分拣和放置。
这可能涉及机械臂、传送带或其他自动化设备,以实现零件的精准抓取和放置。
6. 系统优势与应用:
机器视觉分拣系统具有高效准确、自动化程度高、适应性强和实时监控与反馈等优势。

它在工业制造中广泛应用于生产线上对零部件、产品等进行检测和分拣,提高生产效率和产品质量。
工业机器视觉系统通过图像采集、图像处理、特征提取、分类与识别以及控制与分拣等步骤,实现自动化零件分拣。这一过程不仅提高了分拣的效率和准确性,还降低了人力成本,是现代智能制造的重要组成部分。