机器视觉系统与工业机器人实现数据通信的方式主要有以下几种:
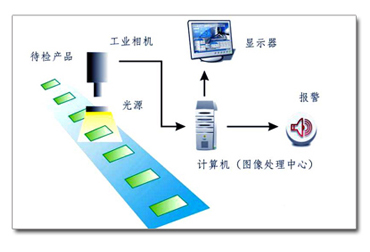
1. 利用传感器和摄像头:机器视觉系统通过摄像头获取环境中的图像信息,然后通过图像处理算法提取关键的特征和结构,这些特征可以传递给机器人,使其了解当前的环境,从而做出决策和行动。

2. 基于计算机视觉和机器学习技术:通过训练算法,机器人可以学会识别和分类不同的物体和场景,从而更好地与环境进行交互。例如,机器人可以通过计算机视觉模型来判断图像中的物体是什么。
3. Socket通信:这是一种常见的网络通信方式,用于实现机器视觉系统与工业机器人之间的数据交换。例如,ABB机器人与视觉系统之间的通信就采用了Socket通信,通过编程规约或提取数据,实现双方的有效通信。
4. 串口通讯:串口通讯是一种常见的通讯方式,一般采用modbus的通讯协议。PLC和机器视觉系统之间通过串口连接,实现数据的双向传输。但需要注意的是,串口传输速率较低,可能会影响系统的响应速度。
5. 网络通讯:网络通讯是一种更加高效的通讯方式,一般采用TCP/IP的通讯协议。PLC和机器视觉系统之间通过网络连接,实现数据的双向传输。这种方式可以支持更高的传输速率和更大的数据量。
机器视觉系统与工业机器人实现数据通信的方式多种多样,具体选择哪种方式取决于实际的应用场景和需求。