
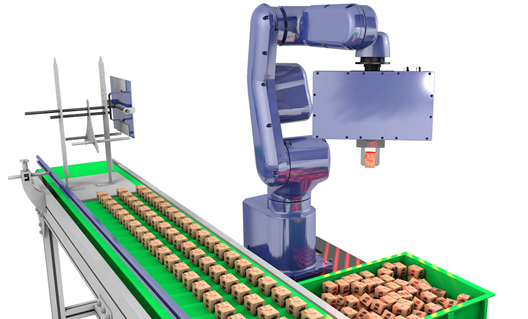
3D视觉(无序/散乱)抓取方案
提供一种三维视觉引导机械手抓取的方法与系统,旨在解决现有机械手无法自主识别三维空间中非固定目标作业点…
提供一种三维视觉引导机械手抓取的方法与系统,旨在解决现有机械手无法自主识别三维空间中非固定目标作业点…
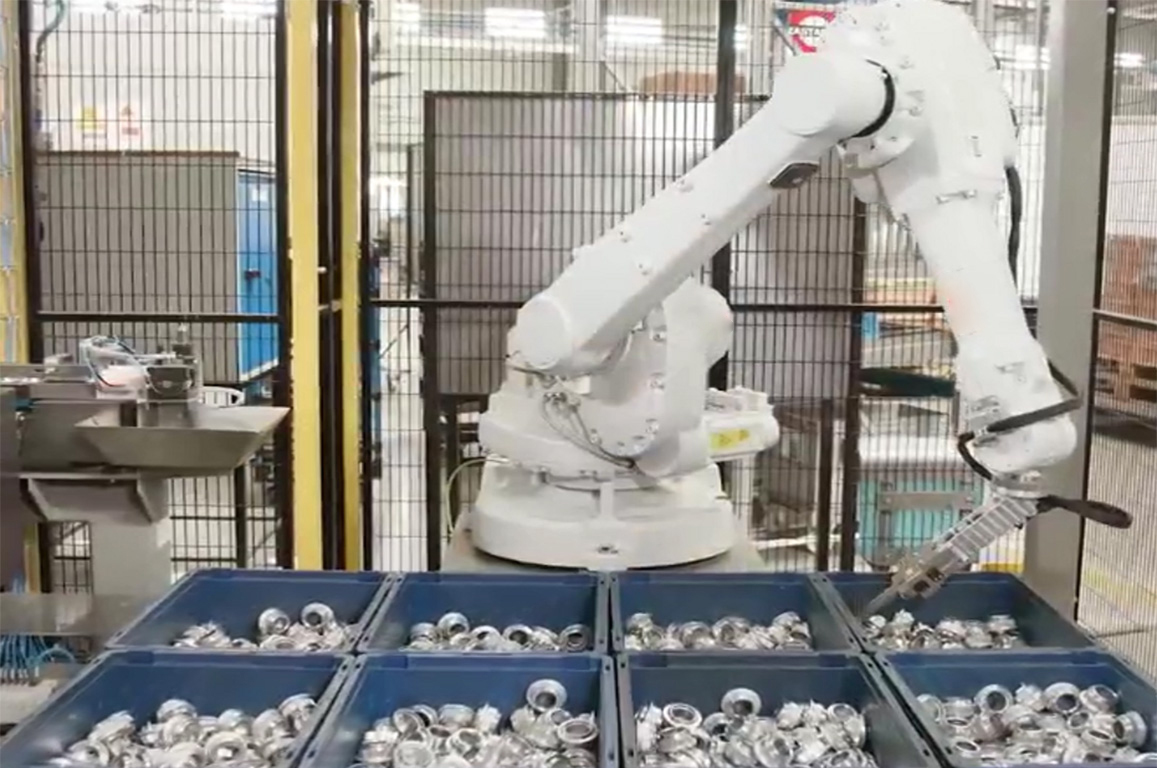
工业机器人可以完成固定模式物体的抓取,轻易实现快速分拣。但对于复杂堆叠物体的识别和分拣,依然有90%…
本案例中使用的是盈泰德旗下一款3D扫描仪Int-XL,这款扫描仪有2300×1600×1300的超大…
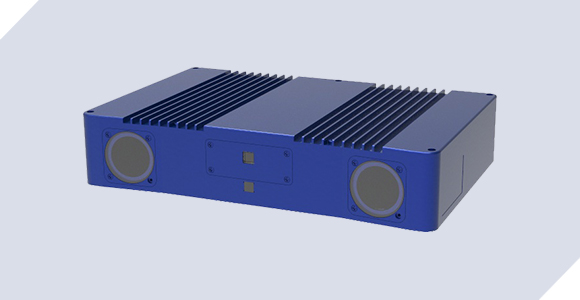
一、产品概述 盈泰德3D相机(Int-XL) 是用三维的方式去观察,理解所见场景,将物理三维世界转换…

